
Bose は、アクティブサスペンションシステムを、リラクゼーションセダン用に開発したが、そのコストや複雑さの為、まだ、システムを採用した市販車はない。当時のセンサーや電磁式アクチュエ―ターはいずれも高価で、複雑だったため、仕方がないだろう。
この動画で、従来型のサスペンションと、アクティブサスペンションを、わかり安く対比させている。私が今回、1/10ドリフトカーで実現させようとしているのは、全く同じ仕組みを使って、この、比較検証ビデオの従来型のサスペンションの挙動を表現することだ。
実のところ、サーボの出力を、逆転すれば、Boseのアクティブサスの様なふるまいをする。なぜなら、Boseのアクティブサスペンションの仕組みをほぼ網羅しているからだ。
但し、2Kg程度の車が、車高8mm程度では、何もしなくてもサスペンションの挙動を見ることはとても難しい。
そこで、このBoseのアクティブサスペンションの機構を縮小して、車の、挙動を、大げさに拡大して見せるために、アクティブサスペンションを利用するのだ。
傾斜地
ビデオでは、傾斜地では、谷川の車高をあげ、山側の車高を下げ、乗員が、なるべく水平になるように車体をコントロールしている。その中心になるのがジャイロセンサーだ。今回のアクティブサスペンションもジャイロセンサーで、車体の挙動をリアルタイムにモニターし、フィードバックしている。
凸凹路
従来型サスペンションでは、障害物に乗り上げるイベントを起点としてサスペンションが伸縮して、そのばねの動きを制御するためにオイルダンパーが、反射的なスプリングの反応を抑える。 この動きは、車体の移動に対して常に遅れて、一連の動作サイクルが起こる。そのため、このビデオの様なテストでは極端にデメリットが出てしまう。
解決法
アクティブサスペンションは、自在に伸縮コントロールができるので、障害物を乗り越えるタイミングが、わかっていれば、その障害物に乗り上げる直前に、サスペンションを縮めれば、よいのです。また、従来のサスペンションのように連続した凹凸に対し、挙動の遅れが指数関数的にに蓄積しないので、コイルスプリングとオイルダンパーを使った従来式のサスペンションでは、絶対に不可能な制御を実現させます。
どのように障害物を検知するのか?
Boseのシステムは、レーザーを使ったLidarセンサーと光学カメラを使って、路面の障害物や突起を進行方向側に走査し、その情報をリアルタイムに処理し、ジャイロによる車体の傾き情報と統合して、電磁駆動サスペンションの伸縮を能動的にコントロールしていました。
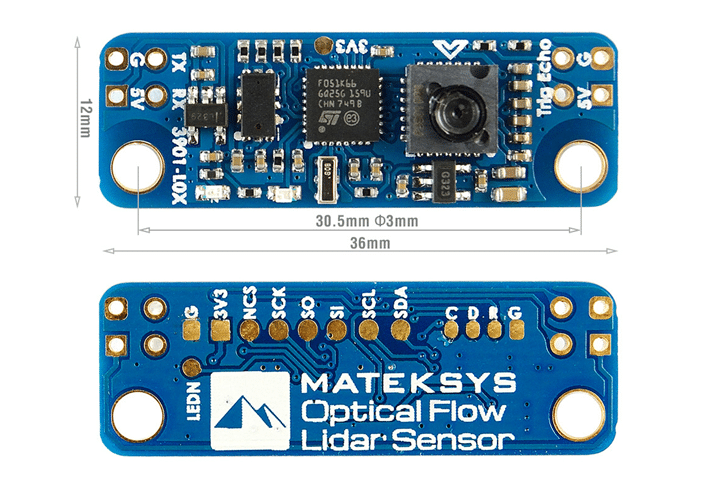
Lidarセンサーと光学カメラは、ほんの10年前では大変高価な計測センサーで、コストアップに直結するパーツですが、現在では、同じ機能を持ったチップが3500円程度で入手できます。
このボードをバンパーの下に取り付け、MPU6050ジャイロとの制御と統合させれば、動画のように、障害物を、飛び越えることも可能でしょう。









