私もドローンを飛ばす前には、ヘリコプターを飛ばしていました。今のヘリコプターは昔と違って空力的安定機構がありません。そのためそのマニューバニリティはパラメーターの設定次第で考えうる飛行フィールにかなり近づけることができます。
ヘリコプターの機械としての面白さ
ヘリコプターは航空工学の中でも、飛行安定性の確保という観点で最も複雑な制御対象である。固定翼機が翼の形状自体で静的安定性を得るのに対し、ヘリコプターは本質的に不安定な飛行体であり、姿勢を維持するための制御入力を常時要求する。したがって、ヘリコプター技術の歴史とは、空力構造の進化であると同時に、制御工学の発展史そのものである。
実用化を阻んだ三つの障壁は、エンジンの出力不足、材料強度の限界、そしてローター推力の偏向制御機構の欠如であった。第三の課題こそ、今日のサイクリックピッチコントロールに相当するものであり、回転する翼の迎角を周期的に変化させる高度なメカニズムを必要とした。この問題を初めて理論と実装の両面で解決したのが数学者アーサー・ヤングである。彼は模型ヘリによる反復実験を通じて安定化理論を確立し、後にベル・ヘリコプター社がこの技術を実用機に導入した。
シングルローター方式ヘリコプターは、メインローターによる揚力生成と、反トルクを打ち消すテールローターによるヨー制御を特徴とする。このときメインローターの推力ベクトルを任意方向に偏向させるのがサイクリックピッチ制御であり、これが縦横姿勢と位置制御を兼ねる。この構造は美しくも非線形であり、気流変動や慣性相互作用が入り乱れる高度に結合した多入力多出力系(MIMO系)として動作する。すなわち、ヘリコプターは典型的な「交差干渉を内包する非線形制御系」であり、この複雑さが飛行の難易度を決定づけている。
模型化に際しては、相似則の破綻によってこの問題がさらに顕著になる。機体サイズの縮小は慣性モーメントの急減を伴い、空力ダンピングや自立安定性を大きく損なう。そのため模型ヘリでは、機械的フィルタとも言える「スタビライザーバー」、すなわちベル・ヒラー式機構が導入され、ローターの周期応答に一次遅れ要素を与えることで振動と過渡応答を緩和した。この方式は、今日で言うところの「受動的安定化機構(passive damping)」に相当する。
1980年代に入ると、電子ジャイロによる能動制御(active control)が登場する。ヨー軸に設けられた角速度センサーがトルク変動を検知し、テールローターのピッチ角を自動補正することで、出力変動に対する閉ループ制御が成立した。この制御系は比例・積分・微分(PID)要素を組み合わせた典型的なフィードバック制御であり、推力偏向をリアルタイムに安定化する仕組みとして機能した。特にヘディングロックジャイロの導入は、従来のオープンループ的な操縦修正を不要にし、人間の操作系そのものを補償する画期的な進化であった。
2000年代に入ると、マイクロセンサー技術の進歩によって6軸ジャイロが低価格化し、姿勢角・加速度を高頻度で検知できるようになった。これにより、従来機械的に担っていた安定化機構をすべて電子的に置き換える「FBL(Flybarless)」制御が現実化する。先駆けとなったのはドイツのMikado社が開発したVStabiシステムである。VStabiは、ローターの挙動モデルを内蔵し、姿勢フィードバックと操縦入力を統合したデジタル制御を実装した。このシステムでは、センサ情報から直接スワッシュプレートを駆動し、遅れ要素を最小化。従来のスタビライザーバーによる受動安定化を完全にソフトウェアで再現・超越した。
Mikado VBar control
FBL化によって構造は簡素化し、慣性低減と応答性向上が同時に達成された。現代のラジコンヘリコプターは、もはや機械式の安定機構を持たず、完全にセンサー融合型の電子制御装置に依存している。ここで重要なのは、制御対象そのものがもはや人間の手反応を越えた時間スケールで動作している点だ。ラジコンヘリは今や、単なる模型の枠を越えた「非線形飛行制御系の実験装置」としての価値を持ち、制御理論の応用が直接的に体感できる数少ない実例となっている。
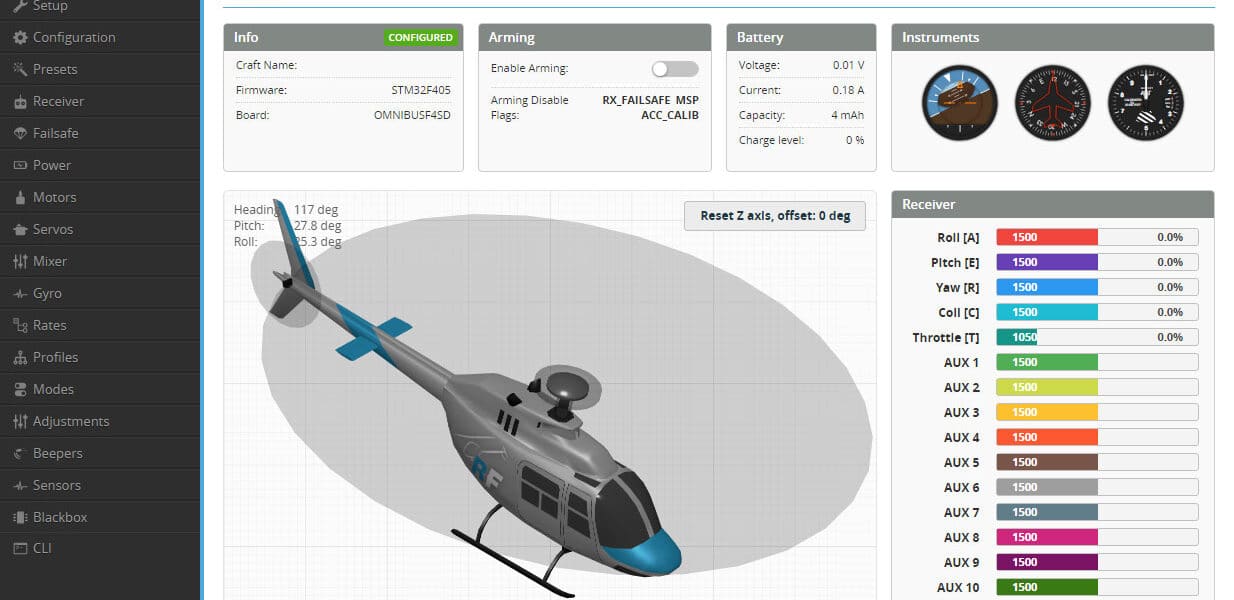
RotorFlightとは
ローターフライトは、FPVフライアーにはおなじみのMultiWii系のコントローラー、Betaflightの4.2からフォークした伝統的なシングルローターヘリコプター専用に進化した、フライトコントローラーです。
最近のEdgeTX送信機とELRS送受信プロトコル、 Lua スクリプトを活用し、VBarControl systemにかなり近い操作性を持った成熟したヘリコプター用フライトコントローラーとなりつつあります。
FBL(フライバーレス)systemの注意点
FBLSystemで、の見落としがちなパラメーター
ローターフライトは、メインローターのガバナーによる回転数コントロールからピッチ/ロール/ヨーまで、すべて比例・積分・微分(PID)要素を組み合わせた典型的なフィードバック制御でありすべて統合的にコントロールされています。そのため、ローターを交換したりした場合でもパラメーターの見直しが必要となります。
些細な部品交換や機械的な設定変更を行っただけでも広範囲のパラメーターの再調整が必要になります。
Rotorflightを使用している場合、その様な見落としがちなパラメーター変更をPDFにまとめましたので、よろしければご利用ください。
PDFの無償ダウンロードはこちらから (GoogleDrive)
RotorFlightの徹底解説本を執筆しました。
パラメーターの意味やその効力について詳しく理解したい方は下記の書籍を是非お読みください。